人型机器人走入现实,感知应用深度剖析
摘要
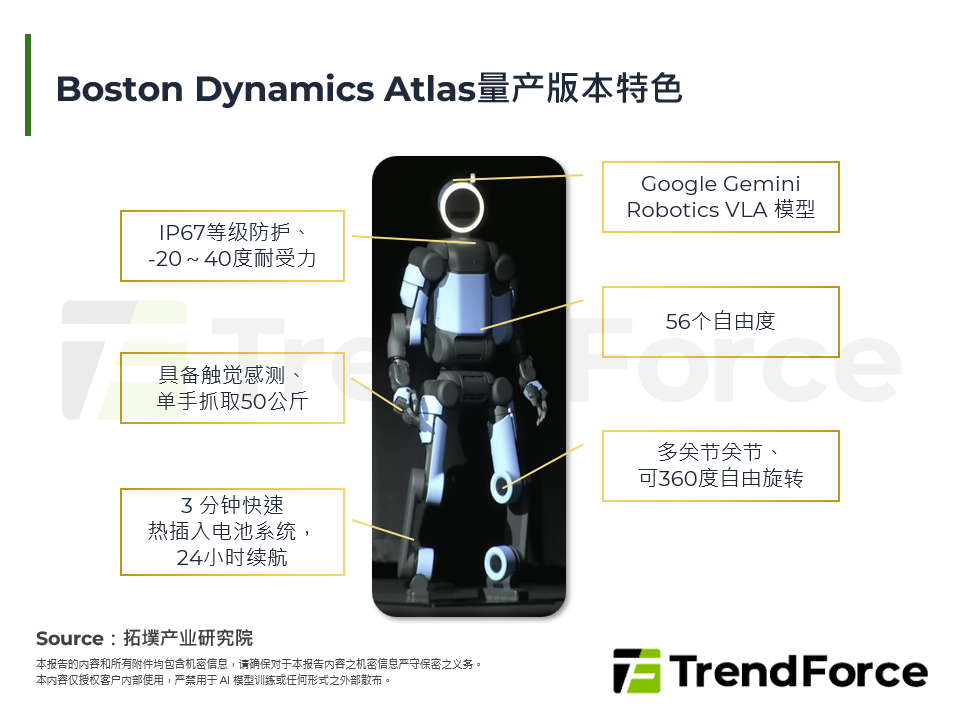
随著全球市场扩大投资AI运算与发展相关应用,人型机器人有望成为市场规模最大的AI应用,厂商导入力矩和惯性感测技术是人型机器人可灵活行走、在各种场景模仿人类行为的关键,这2种感测器系统需要完美协同,推动机器人从简单的编程动作向更自然的人类行为表现发展,且人型机器人需要在复杂多变的环境中工作,并与人类具备相似的反应速度,其感测系统必须精确感知周围环境并做出反应,目前已有多家机器人厂商专攻其行走表现。
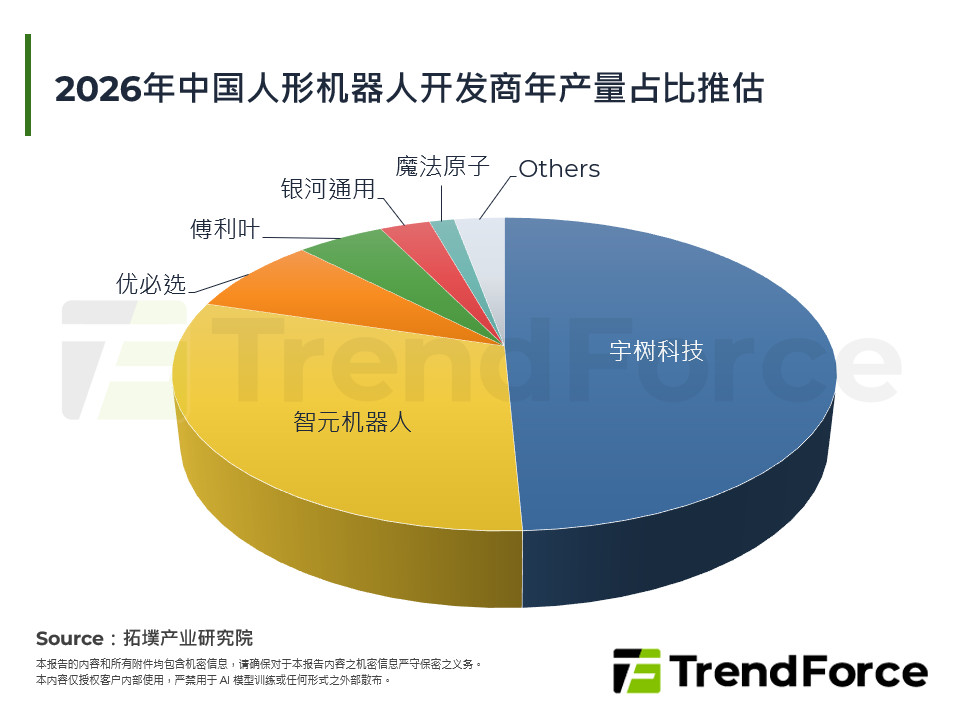
一. 人型机器人市场现况与感测应用需求
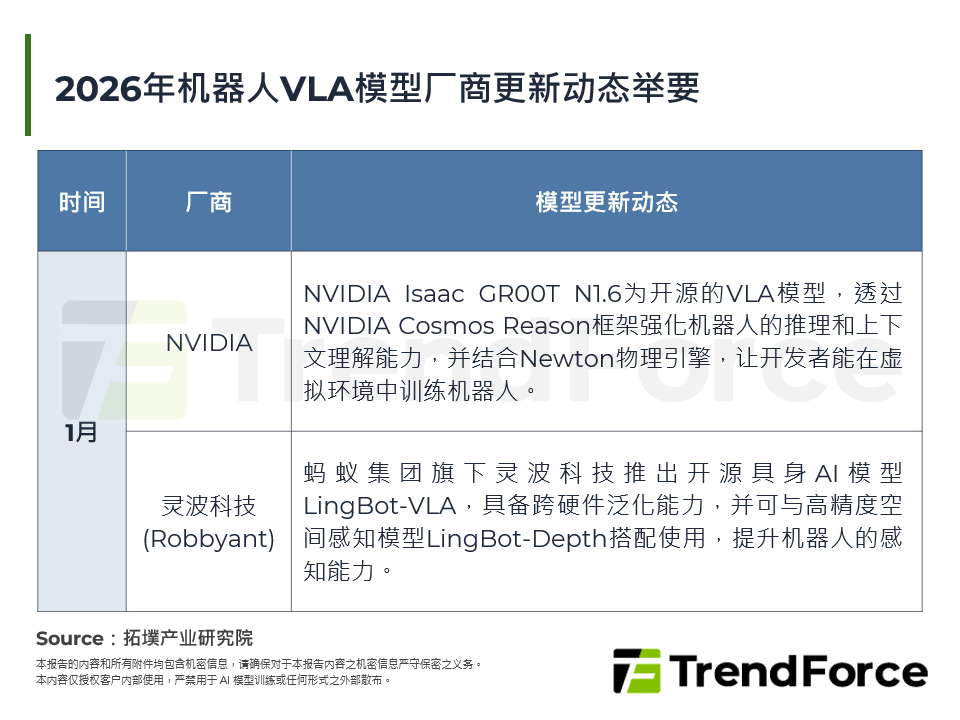
二. 机器人行为表现由力矩感测与IMU技术主导
三. 力矩感测器与IMU整合加速机器人行为学习
四. 拓墣观点
图ㄧ 机器人感测数据处理流程
表一 应变式六轴力矩感测器工作原理流程图解