各等级控制器之间的零组件成本占比
摘要
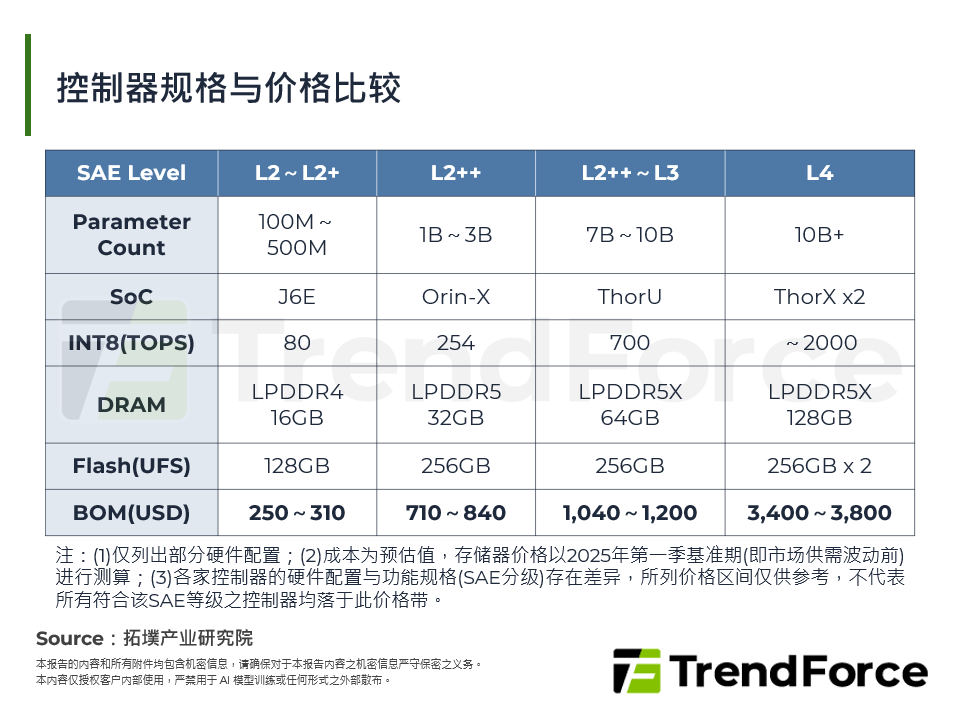
VLA(Vision-Language-Action)模型已成为自动驾驶演进的核心,其优势在能显著提升罕见场景的泛化能力,并透过可解释性的推理过程强化系统合规性,是实现L4级高阶自驾的关键路径;然VLA之实现仰赖高规格的硬体架构,尤以算力密度、记忆体容量与频宽的跳升为核心。本篇报告将解析VLA诱发的硬体变革与其对自动驾驶控制器成本结构和晶片供应链变化的连锁影响。
VLA(Vision-Language-Action)模型已成为自动驾驶演进的核心,其优势在能显著提升罕见场景的泛化能力,并透过可解释性的推理过程强化系统合规性,是实现L4级高阶自驾的关键路径;然VLA之实现仰赖高规格的硬体架构,尤以算力密度、记忆体容量与频宽的跳升为核心。本篇报告将解析VLA诱发的硬体变革与其对自动驾驶控制器成本结构和晶片供应链变化的连锁影响。
© 2026 拓墣科技 及/或 集邦科技(集邦咨询顾问(深圳)有限公司) 版权所有