自动驾驶架构流程图
摘要
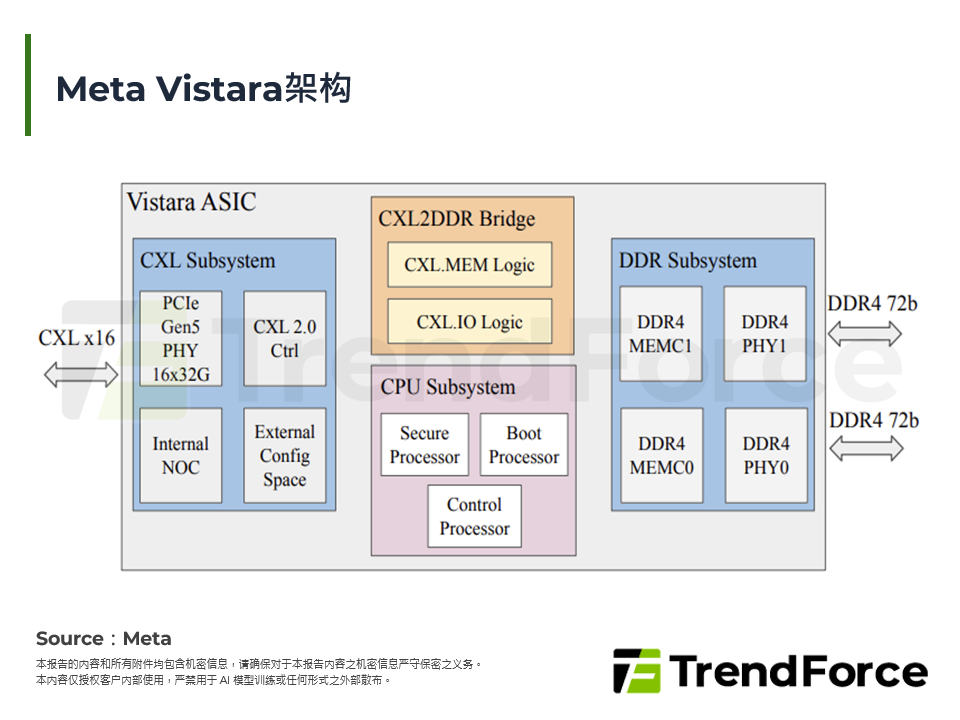
车辆上的感测器数量与种类不断增多,且各感测器皆有优缺点,因此多感测器的融合技术成为一大重点,厂商皆有自己的融合作法,使得多感测融合方式并未有标准方式。随著自驾等级提高,许多情境下的车辆要能自行驾车而不需人为干预,意味车辆上的自驾演算法担负极重大责任,因此车厂皆希望能掌握在手,使得以单一融合算法的后融合与集中运算的集中式架构为发展趋势。
车辆上的感测器数量与种类不断增多,且各感测器皆有优缺点,因此多感测器的融合技术成为一大重点,厂商皆有自己的融合作法,使得多感测融合方式并未有标准方式。随著自驾等级提高,许多情境下的车辆要能自行驾车而不需人为干预,意味车辆上的自驾演算法担负极重大责任,因此车厂皆希望能掌握在手,使得以单一融合算法的后融合与集中运算的集中式架构为发展趋势。
© 2026 拓墣科技 及/或 集邦科技(集邦咨询顾问(深圳)有限公司) 版权所有